
Este proyecto describe cómo se puede mover un motor de CC hacia adelante o hacia atrás usando un control remoto de TV o DVD.El objetivo es construir un controlador de motor bidireccional simple que utilice un tren de pulsos infrarrojos (IR) modulados de 38 kHz para este propósito sin utilizar ningún microcontrolador ni programación.
El prototipo del autor se muestra en la Fig. 1.

Circuito y funcionamiento.
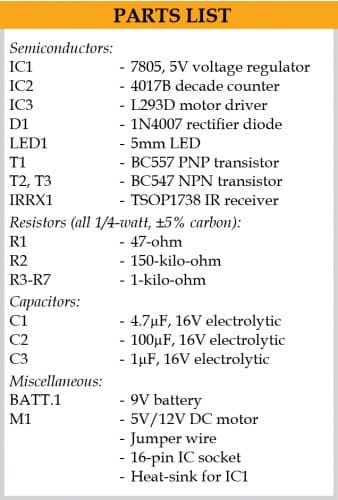
El diagrama de circuito del proyecto se muestra en la Fig. 2. Está construido alrededor del módulo receptor de IR TSOP1738 (IRRX1), contador de décadas 4017B (IC2), controlador de motor L293D (IC3), transistor PNP BC557 (T1), dos transistores BC547 NPN ( T2 y T3), fuente de alimentación regulada de 5V (IC1) y batería de 9V.
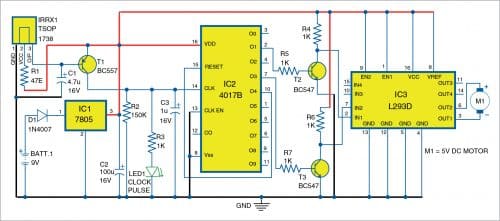
La batería de 9 V se conecta a través del diodo D1 al regulador de voltaje 7805 para generar los 5 V CC necesarios para el proyecto.El condensador C2 (100 µF, 16 V) se utiliza para rechazar la ondulación.
En condiciones normales, el pin de salida 3 del módulo IR IRRX1 está en lógica alta, lo que significa que el transistor T1 conectado a él está cortado y, por lo tanto, su terminal del colector está en lógica baja.El colector de T1 impulsa el pulso de reloj del contador de décadas IC2.
Al apuntar el control remoto hacia el módulo de infrarrojos y presionar cualquier tecla, el módulo recibe los pulsos de infrarrojos de 38 kHz del control remoto.Estos pulsos se invierten en el colector de T1 y se envían al pin 14 de entrada del reloj del contador de décadas IC2.
Los pulsos IR que llegan incrementan el contador de décadas a la misma velocidad (38 kHz), pero debido a la presencia del filtro RC (R2 = 150 k y C3 = 1 µF) en el pin 14 de entrada del reloj de IC2, el tren de pulsos aparece como un solo pulso en el contador.Así, al pulsar cada tecla, el contador avanza una sola cuenta.
Cuando se suelta la tecla del control remoto, el condensador C3 se descarga a través de la resistencia R2 y la línea del reloj se vuelve cero.Entonces, cada vez que el usuario presiona y suelta una tecla en el control remoto, el contador recibe un solo pulso en su entrada de reloj y el LED1 se ilumina para confirmar que se ha recibido el pulso.
Durante el funcionamiento pueden existir cinco posibilidades:
Caso 1
Cuando se presiona la tecla del control remoto, llega el primer pulso y la salida O0 del contador de décadas (IC2) sube mientras que los pines O1 a O9 están bajos, lo que significa que los transistores T2 y T3 están en estado de corte.Los colectores de ambos transistores se ponen en estado alto mediante resistencias de 1 kiloohmio (R4 y R6), por lo que tanto los terminales de entrada IN1 como IN2 del controlador del motor L293D (IC3) se vuelven altos.En esta etapa, el motor está apagado.
Caso 2
Cuando se presiona una tecla nuevamente, el segundo pulso que llega a la línea CLK incrementa el contador en uno.Es decir, cuando llega el segundo pulso, la salida O1 de IC2 pasa a nivel alto, mientras que las salidas restantes están a nivel bajo.Entonces, el transistor T2 conduce y el T3 se corta.Lo que significa que el voltaje en el colector de T2 baja (IN1 de IC3) y el voltaje en el colector de T3 aumenta (IN2 de IC3) y las entradas IN1 e IN2 del controlador del motor IC3 se vuelven 0 y 1, respectivamente.En esta condición, el motor gira hacia adelante.
Caso 3
Cuando se presiona una tecla una vez más, el tercer pulso que llega a la línea CLK incrementa el contador en uno nuevamente.Entonces la producción de O2 de IC2 aumenta.Como no hay nada conectado al pin O2 y los pines de salida O1 y O3 están bajos, ambos transistores T2 y T3 pasan al estado de corte.
Los terminales del colector de ambos transistores se ponen en estado alto mediante resistencias R4 y R6 de 1 kiloohmio, lo que significa que los terminales de entrada IN1 e IN2 de IC3 se vuelven altos.En esta etapa, el motor vuelve a estar apagado.
Caso 4
Cuando se presiona una tecla una vez más, el cuarto pulso que llega a la línea CLK incrementa el contador en uno por cuarta vez.Ahora la salida O3 de IC2 es alta, mientras que las salidas restantes son bajas, por lo que el transistor T3 conduce.Lo que significa que el voltaje en el colector de T2 aumenta (IN1 de IC3) y el voltaje en el colector de T3 disminuye (IN2 de IC3).Entonces, las entradas IN1 e IN2 de IC3 están en los niveles 1 y 0, respectivamente.En esta condición, el motor gira en dirección inversa.
Caso 5
Cuando se presiona una tecla por quinta vez, el quinto pulso que llega a la línea CLK incrementa el contador en uno una vez más.Dado que O4 (pin 10 de IC2) está conectado al pin 15 de entrada de reinicio del IC2, al presionarlo por quinta vez, el IC del contador de décadas vuelve a la condición de encendido y reinicio con O0 alto.
Así, el circuito funciona como un controlador de motor bidireccional que se controla con un mando a distancia por infrarrojos.
Construcción y pruebas
El circuito se puede ensamblar en una Veroboard o en una PCB cuyo diseño en tamaño real se muestra en la Fig. 3. El diseño de los componentes de la PCB se muestra en la Fig. 4.
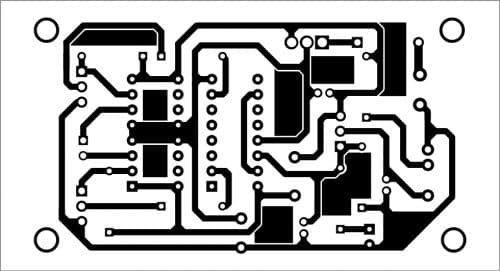
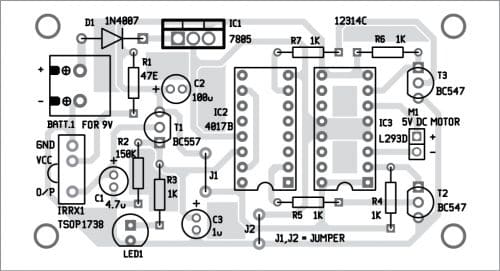
Descargue archivos PDF de diseño de componentes y PCB:haga clic aquí
Después de ensamblar el circuito, conecte la batería de 9 V a través de BATT.1.Consulte la Tabla de verdad (Tabla 1) para conocer el funcionamiento y siga los pasos descritos en los Casos 1 a 5 anteriores.
Editado por Lisa
Hora de publicación: 29-sep-2021